In feite heeft Sparkfun een identiek in hun gamma en ik heb dan ook daar de library van gebruikt.
Ook Adafruit heeft zoiets met hun eigen lib , maar uiteindelijk komt het allemaal op hetzelfde neer , geef mij een xyz positie.
Het type van sensor is een ADXL435
Sparkfun website:
Sparkfun
Hier een foto van de proefopstelling met een arduino uno

Bij de eerste pogingen met een andere lib was het precies of de Zas was gelockt op een vaste waarde . Bij de lib van sparkfun , was de code duidelijker en toen bleek de Zas toch te werken.
Ik heb toen wat " gespeeld" met de sensor . Alle assen eerst apart uitgeplot en gekeken hoe ge nu eigenlijk moest draaien , rond welk draaipunt eigenlijk , wat dat was mij nog niet geheel duidelijk.
Het is zo , als je de assen als een vector voorstelt , je de vector moet kantelen om de juiste werking te krijgen .
iets zoals :
 |
| CW kantelen |
En dan krijg je dit op de arduinoplotter
 |
| Gekanteld rond Xas in CW richting zoals op bovenstaande foto |
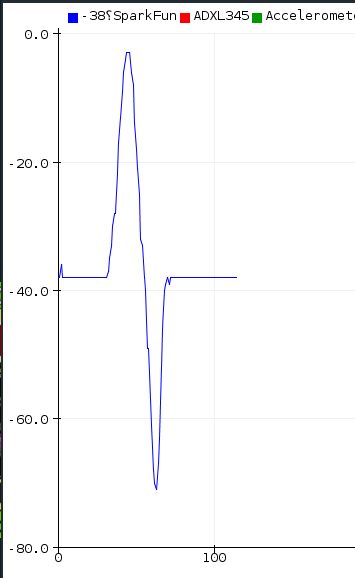 |
| Gedraaid in Xas in CCW richting |
Dit is voor de Yas hetzelfde , maar voor de Zas krijg je dit :


Zowel CW als CCW hebben dezelfde uitkomst.
Nu heb ik geprobeerd om een opstelling te maken waaruit ik zou kunnen afleiden hoe mijn AZ ( bv de Yas ) en mij EL ( dan de Xas of de Zas ) zou zijn maar ik kan geen montage vinden die duidelijk op de plotter mijn positie weergaf.
Ik denk dat ik moet overstappen naar een ander systeem zijnde een goniometer ipv een accelerometer.
Het ander printje is gebasserd op een magn kompasrichting en dit ga ik zeker verder niet exploreren want een magn kompaskoers verandert bijna continue
( in terms van weken) en vergt dan ook continue kalibratie !
Voor alle duidelijkheid , dit is het NIET

Geen opmerkingen:
Een reactie posten