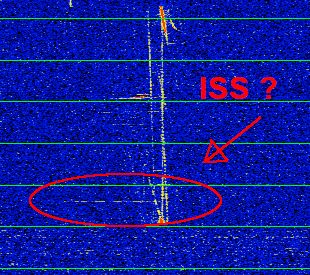
Die zonneruismeting is leuk maar dat gaan we wat laten bezinken .
Er is iets meer dringend en dat is een nieuwe sturing maken voor de AZ/EL rotor.
De controlbox die er nu bij is , dat zijn vastgeprogrammeerde kanalen en was eertijds voorzien voor de TV satellieten.
Men kan wel via PRG mode zelf de besturing overnemen , maar dat is meer om uit te lijnen , niet voor dagelijks gebruiK.
Dus moet er iets nieuws komen , maar wat ?
Wat ik wel al weet , dat is dat de hardware dicht bij de schotel zal komen met een eigen voeding , en dat de communicatie zal gebeuren via ofwel een seriele link ofwel , en dat is meer waarschijnlijk , via een UDP of TCP connectie .
Stelt zich dan nu de vraag : welke hardware ,
Er zijn twee grote kandidaten , ofwel gaan we arduino , ofwel gaan we raspberry pi.
Voor het programmeren kan men dit doen bij arduino in C ( of eventueel C++) maar hoe gaan we dit in een Gui gieten , dit zou dan QT5 kunnen worden .
Diezelfde Gui zou ook gebruikt kunnen worden bij een raspberry pi en deze zou op zichzelf in Python kunnen geprogrammeerd worden . Ook QT5 bestaat in een python-smaak .
Een faktor dat we zekers in de gaten moeten houden en waar veel van zal afhangen is de noodzakelijkheid dat de pulsgevers in de rotor accuraat zullen moeten ingelezen worden en dit zal dan geen polling worden maar met een interrupt service routine.Men kan zich niet veroorloven om pulsen en daarmee positie te verliezen . Dus is maar de vraag , is Python daar snel genoeg voor omdat deze geen compilator maar een interpreter is .
Doordat C wel gecompileerd wordt , is dit wel snel.
Voordeel van een raspberry pi is dat bij wijziging in de soft dit direkt te testen valt , bij de arduino moeten we steeds opnieuw flashen.
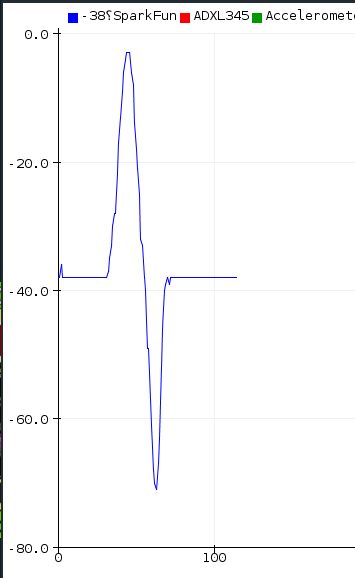
Een extraatje zou een gyroscoop op de schotel zijn zodat we een tweede onafhankelijk bron hebben van de bewegingen van de schotel.Deze werken meestal met i²C .
De reeds in bezit hebbende hardware